














Specification
| General | Mechanical | ||
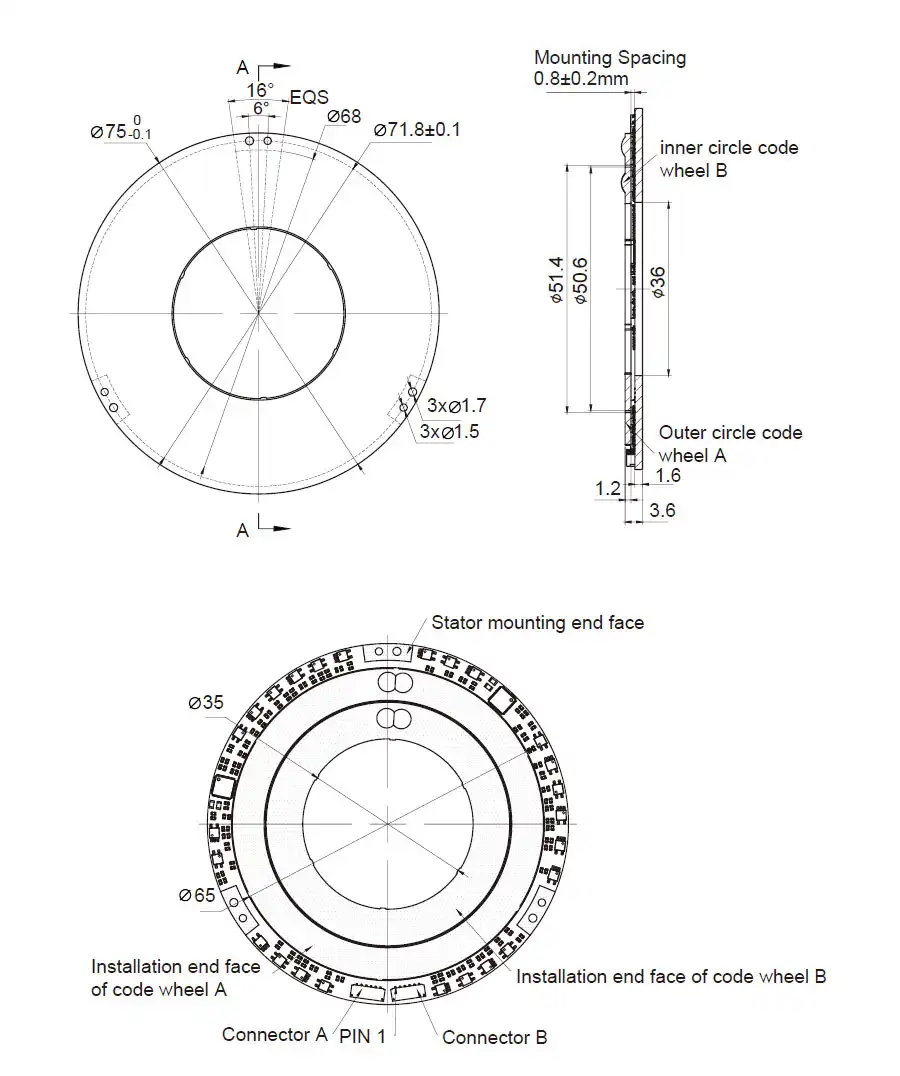
| resolution(bit) | 18-20 | outer/inner /height (mm) | 75/35/3.6 |
| maximum static error | ±0.01° | allowable mounting eccentricity (mm) | ±0.1 |
| repetitive error(lsb) | ±2 | allowable axial mounting tolerance (mm) | 0.8±0.2 |
| maximum operational speed(rpm) | 6000 | rotor inertia (kg·mm2) | 1.84/3.95 |
| measurement range | single turn | weight(g) | 25 |
| rotation direction | adjustable cw/ccw | material (stator/rotor) | FR-4 |
| Environmental | Electrical | ||
| emc | iec 61000-6-2 iec 61000-6-4 | supply voltage | 5v |
| operating temperature | -40℃~+125℃ | current consumption | <80ma |
| relative humidity | 0-99% | communication | ssi/biss-c/rs-422/rs-485 |
shock endurance/ functional | 100g/11ms | ||
vibration functional | 20g(10-2000hz) | ||
| protection | ip 40 | ||
Drawing
Ordering Code
B:biss-c interface/S:ssi interface
R:rs-422 serial interface/E:rs-485
05: 5V (default)
12: 12V
24: 24V
01:-30°C~+85°C(efault)
02:-40°C~+125°C
15:15-bit(32768)
17:17-bit(131072)
18:18-bit(262144)
19:19-bit(524288)
20:20-bit(1048576)
21:21-bit(2097152)
22:22-bit(4194304)
A: Single-turn absolute
60: Outer diameter 60mm
25: Inner diameter 25mm
C: single absolute encoder
D: Upper/lower dual absolute encoder
DP: Inner/outer dual absolute encoder
Illustrated by example
C–25–60–A–19–01–05–S indicates a C-series single-turn absolute encoder with a 25 mm bore diameter and 60 mm outer diameter. “19” denotes 19-bit single-turn absolute resolution. The operating temperature range is −40 °C to ~+125 °C, the power supply is 5~30 V, and the output communication protocol is SSI.
D–21–58–A–19–02–05–E indicates a D-series absolute dual encoder with a 21 mm bore diameter and 58 mm outer diameter. “19” denotes 19-bit single-turn absolute resolution. The operating temperature range is −40 °C ~ +125 °C, the power supply is 5 V, and the output communication protocol is RS-485.
DP–20–50–A–19–02–05–E indicates a DP-series absolute dual encoder with a 20 mm bore diameter and 50 mm outer diameter. “19” denotes 19-bit single-turn absolute resolution. The operating temperature range is −40 °C ~ +125 °C, the power supply is 5 V, and the output communication protocol is RS-485.
Case studies (Customized frameless motors developed with our clients)




Additional Info
The **DP3575** utilizes inductive sensing for immediate, absolute angular positioning upon startup. Its rugged, non-contact design ensures high precision in extreme environments, while the slim, hollow-shaft profile simplifies integration without specialized hardware. Supporting high-resolution BiSS-C, UART, and SSI interfaces, it is fully customizable. Crucially, its dual-output architecture provides independent signal redundancy, maximizing system safety. This makes it an ideal, fail-safe solution for mission-critical applications in medical robotics, aerospace, defense, and high-end industrial automation.
Features & Benefits:
✔️Non-contact
✔️Hollow shaft
✔️Low profile
✔️High precision
✔️True absolute system
✔️Low power consumption
✔️No maintenance
✔️No bearings
✔️Easy to install
✔️Tolerance to EMI / RFI
✔️Shock and Vibration Tolerance
✔️Customized extension options
Download

DP3575 Inductive Rotary Absolute Encoders Datasheet.pdf
OD: 75mm|Height: 3.6mm
Frequently bought together - Magnetic encoders
Direct drives need high-quality position signals to ensure optimal performance. Perfect measuring signals can enhance the surface quality of machined workpieces, reduce the machine frame's vibrations, minimize velocity-dependent motor noise, and prevent excessive heat generation in the motor.
Mosrac recommends using a magnetic encoder to enhance the accuracy, speed stability, and thermal behavior of direct drive axes. Because there is no mechanical transmission between the encoder and the feed unit, the position signals are not susceptible to inaccuracies or delays.
Custom combinations are available on request and contact us.



Previous