









Discover how an absolute encoder delivers precise position feedback for motion control systems, improving accuracy, reliability, and industrial automation performance.
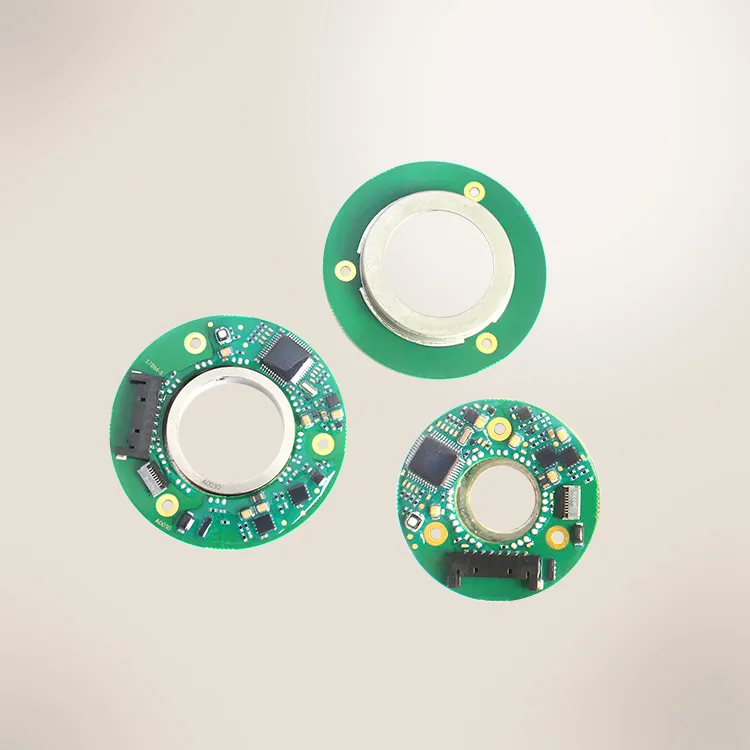
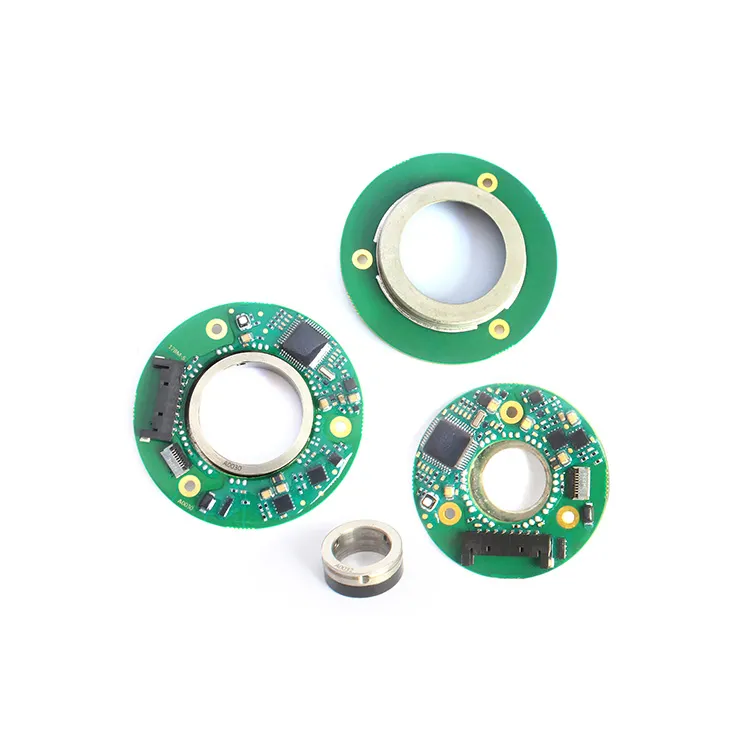
Absolute Motor Encoder
The absolute encoder is a precision position sensor that outputs a unique digital value for every shaft or linear position, even after power loss.
Unlike incremental encoders that rely on pulse counting, absolute encoders provide immediate position feedback at startup, eliminating the need for homing routines. By delivering continuous, reliable position feedback, absolute encoders enable precise servo control and coordinated multi-axis motion.
Mosrac specializes in high-precision absolute encoder solutions engineered for demanding industrial motion control applications.
Why Absolute Encoders are Essential for Reliable Closed-Loop Control?
The closed-loop motion control systems depend on continuous and accurate position feedback to maintain stability and precision. The absolute encoder provides real-time position data, allowing controllers to adjust motor torque, speed, and direction instantly. This capability ensures predictable motion behavior, especially in systems where position accuracy and operational safety are critical.
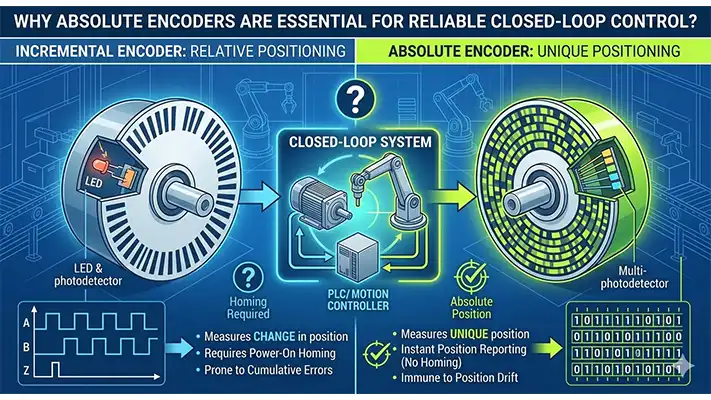
Incremental Encoders vs Absolute Encoders; Source: Gemini
Here’s why absolute encoders are essential:
● Enabling True Absolute Position Feedback: These encoders deliver a unique digital position value for every shaft angle or linear position. Because the position is encoded directly, the system knows the exact location of the axis immediately at startup. So, no homing sequence is required.
● Power-Loss Safe Operation: In many industrial systems, unexpected power interruptions are unavoidable. Absolute encoders maintain their position information even after power loss. When power returns, the controller receives the correct position instantly, eliminating the need for reference routines and reducing system downtime.
● High-Resolution Motion Accuracy: The absolute encoders provide detailed angular information that improves torque smoothness, velocity regulation, and path precision. Higher bit depth enables finer motion increments, resulting in smoother trajectories and more accurate positioning in multi-axis systems.
● Stability in Industrial Environments: Industrial environments expose sensors to vibration, dust, oil contamination, and electromagnetic interference. Depending on the sensing technology used, absolute encoders can maintain stable operation under these conditions.
How an Absolute Encoder Works?
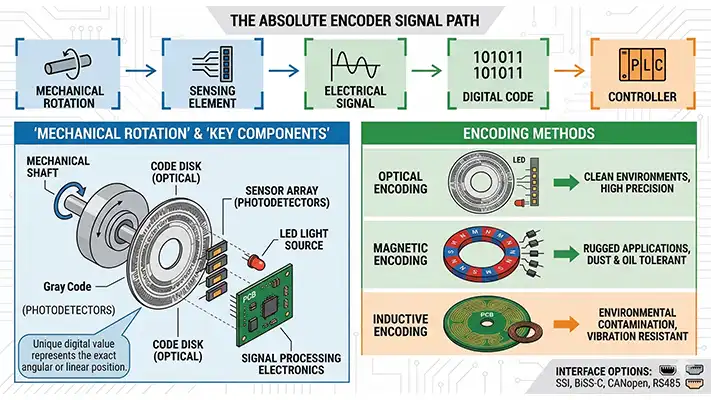
The absolute encoder converts mechanical motion into a digital position value that a controller can read instantly. The signal path follows a clear sequence:
mechanical rotation → sensing element → electrical signal → digital code → controller
Once the shaft rotates, the sensing system detects position changes and generates signals that are processed into a unique digital value representing the exact angular or linear position.
Core Working Principle
During operation, the rotating shaft or moving scale interacts with a sensing element. This interaction produces an electrical signal that corresponds to the physical position. The signal is then conditioned and encoded into a digital format. The controller receives this data through a communication interface and uses it to regulate motion in real time within a closed-loop control system.
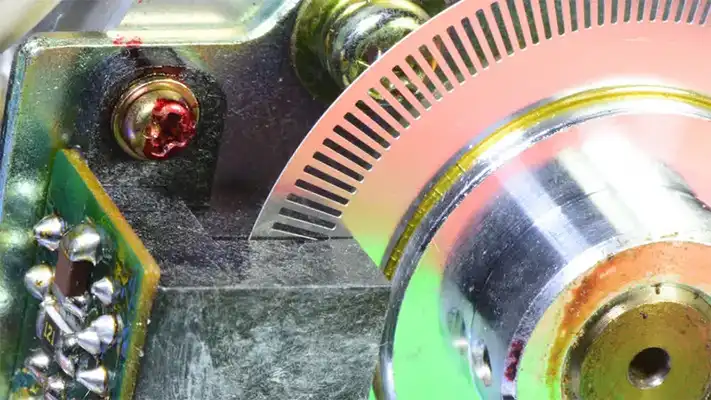
Key Components
● Code Disk or Magnetic Ring: The code disk (in optical encoders) or magnetic ring (in magnetic encoders) defines the physical position pattern. These patterns represent specific angular or linear positions that the sensor can detect.
● Sensor Array: The sensing element detects the encoded patterns. Optical encoders use photodetectors, magnetic encoders use Hall-effect or magnetoresistive sensors, and inductive encoders rely on electromagnetic sensing structures to detect position changes.
● Signal Processing Electronics: Raw analog signals from the sensor are amplified, filtered, and converted into digital position data. This data is transmitted to motion controllers through industrial interfaces such as SSI, BiSS-C, CANopen, or RS485.
Encoding Methods
● Optical Encoding
Optical absolute encoders use a code disc and photodiodes to detect light patterns that correspond to specific positions. This method can achieve very high resolution and accuracy, making it suitable for precision systems operating in clean environments.
● Magnetic Encoding
Magnetic encoders rely on a magnetic ring and sensor IC to detect variations in magnetic fields. They are more tolerant of dust, oil, and vibration, making them well-suited for rugged industrial applications.
● Inductive Encoding
Inductive encoders use printed circuit coils and operate on the electromagnetic coupling principle. They are highly resistant to environmental contamination and maintain stable performance even in the presence of dust, oil, and mechanical vibration.
Types of Absolute Encoders
The absolute encoders can be classified based on how they track motion, the type of movement they measure, and the sensing technology used.
Inductive Encoder - Mosrac
1. By Rotation Tracking Capability
● Absolute Encoder Single Turn measures position within one full rotation, typically from 0° to 360°. Each angular position corresponds to a unique digital code. These encoders are widely used in servo motors, robotics, and compact motion systems where only one rotation needs to be tracked precisely.
● Absolute Encoder Multi-Turn can track both the position within a single rotation and the total number of rotations. This capability allows the system to maintain position information across multiple shaft turns. Multi-turn encoders are commonly used in elevators, industrial machinery, and large continuous-positioning systems.
2. By Motion Type
● Rotary Absolute Encoder measures the angular position of a rotating shaft. It is commonly integrated into servo motors, robotic joints, and industrial automation equipment to provide accurate rotational position feedback.
● Absolute Encoder Linear measures straight-line displacement rather than rotational motion. These encoders use a magnetic, optical, or inductive scale along a linear path and are widely used in CNC machines, gantry systems, and precision positioning stages.
3. By Technology
● Absolute Encoder Optical uses a coded disc and a photodetector array to detect light patterns corresponding to specific positions. They offer very high resolution and accuracy, making them suitable for precision applications operating in controlled environments.
● Magnetic Absolute Encoder detects position using a magnetic ring and a magnetic sensor IC. They are more resistant to dust, oil, vibration, and contamination, making them well-suited for industrial automation and harsh environments.
● Inductive Absolute Encoder operate using printed circuit coils and electromagnetic coupling. They provide strong immunity to dust, oil, and vibration, and are often used in high-reliability industrial motion control systems where environmental robustness is essential.
Resolution, Accuracy, and Error Sources
The performance of an absolute encoder is defined by several parameters that directly affect the quality of position feedback in motion control systems.
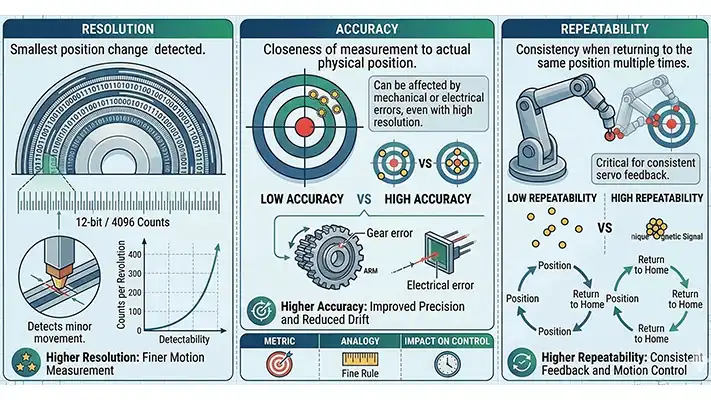
Resolution vs Accuracy vs Repeatability
Resolution refers to the smallest position change the encoder can detect. It is typically expressed in bits or counts per revolution. Higher resolution allows finer motion measurement.
Accuracy describes how close the measured position is to the actual physical position. Even with high resolution, mechanical or electrical errors can reduce true accuracy.
Repeatability indicates the ability of an encoder to return the same measurement when the shaft moves to the same position multiple times. High repeatability is essential for consistent servo motor feedback and precise motion control.
Resolution vs Accuracy vs Repeatability
Binary vs Gray Code Encoding
The absolute encoders commonly use binary or gray code to represent position values. Binary encoding can produce multiple bit transitions simultaneously during position changes, which may introduce temporary reading errors.
The gray code encoding, however, changes only one bit between adjacent positions. This reduces transition ambiguity and improves reliability when signals are sampled by the controller.
Bit Depth and Angular Precision
The encoder resolution is determined by bit depth. For example:
● 12-bit resolution → 4,096 positions per revolution
● 14-bit resolution → 16,384 positions per revolution
● 17-bit resolution → 131,072 positions per revolution
Higher bit depth provides finer angular measurement, which improves motion smoothness, velocity control, and positioning precision in servo-driven systems.
Mechanical Tolerance and Runout
Mechanical imperfections can introduce measurement error. The shaft misalignment or radial runout changes the relative position between the sensor and the code disk or magnetic ring. Variations in the air gap between the sensing element and the target pattern can also affect signal amplitude and measurement stability.
Temperature Drift and Signal Stability
Temperature changes influence both mechanical and magnetic properties. The material expansion may alter alignment or air-gap distances, while magnetic field strength can vary with temperature. Advanced encoder designs compensate for these effects through calibration and signal processing.
In many applications, inductive sensing technologies provide improved stability because they rely on electromagnetic coupling rather than magnetic field strength.
Latency and Control Loop Bandwidth
Signal latency is the delay between the encoder detecting motion and the controller receiving the position data. Low latency is critical in high-speed servo systems, where control loops operate at high update rates. Fast digital communication ensures that the controller receives accurate position information in real time, improving servo bandwidth, motion stability, and trajectory precision.
Absolute Encoder Interfaces and Communication Protocols
The absolute encoders transmit position data to controllers through digital communication interfaces. The choice of interface affects data transmission speed, noise immunity, and system integration. In industrial motion control systems, reliable communication between the encoder and the controller is critical for maintaining stable closed-loop performance.
SSI (Synchronous Serial Interface)
SSI (Synchronous Serial Interface) is one of the most widely used communication protocols for absolute encoders. It operates using a clock signal generated by the controller and returns position data sequentially from the encoder.
SSI is valued for its high noise immunity and simple implementation, making it suitable for industrial automation environments. However, SSI typically supports moderate data transmission speeds and lacks advanced error-detection features compared to newer protocols.
BiSS-C
BiSS-C is an advanced bidirectional communication protocol designed specifically for high-performance motion control applications. It supports high-speed data transfer, low latency, and built-in error detection, which improves reliability in demanding control systems.
BiSS-C is commonly used in robotics, servo motors, and CNC machinery, where precise synchronization and fast feedback updates are required.
SPI
SPI is a high-speed communication protocol often used in embedded systems and microcontroller-based applications. It allows rapid data exchange between the encoder and the controller, making it suitable for systems requiring fast update rates and compact electronic integration.
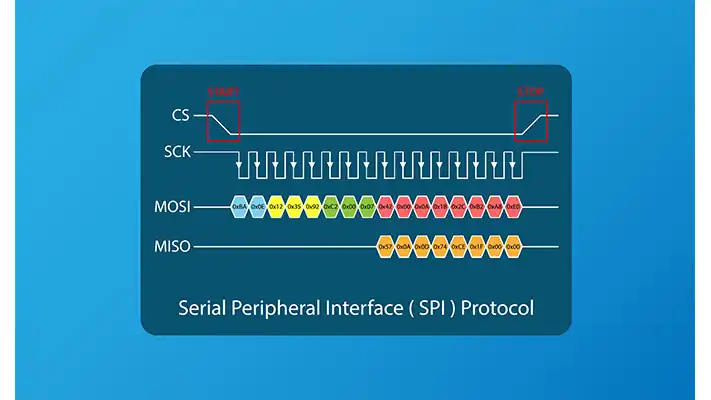
Serial Peripheral Interface (SPI)
SPI is frequently used in development platforms, prototyping systems, and controller-based applications, including systems that integrate encoders with microcontrollers or platforms such as Arduino.
RS485
RS485 is a differential communication standard designed for long-distance and noise-resistant data transmission. It is widely used in industrial networks where multiple devices share a communication bus.
The differential signaling method of RS485 provides strong electromagnetic noise immunity, allowing reliable encoder communication in electrically noisy environments such as factories, motor drives, and automated production lines.
Common Industry Applications of Absolute Encoders
The absolute encoders are widely used in industries where precise position feedback, system safety, and reliable startup behavior are critical. Their ability to provide a unique position value at power-up eliminates the need for homing routines, making them suitable for advanced automation and safety-sensitive systems.
Absolute Encoders are used in Robotic Arms
● Robotics (Humanoid & Collaborative)
In humanoid robots and collaborative robots (cobots), accurate joint position feedback is essential for coordinated multi-axis movement. The absolute encoders enable robot controllers to immediately detect the exact joint position at startup. This is important because a homing routine could cause unsafe or unpredictable movement. Reliable servo motor feedback also improves trajectory control, torque stability, and repeatable robotic motion.
● CNC Machines & Manufacturing
CNC machining centers and automated manufacturing systems rely on absolute encoders to maintain precise tool positioning. During milling, turning, or drilling operations, accurate position feedback ensures that the tool path follows the programmed coordinates. Absolute encoders enable machines to resume operation quickly after power interruptions without losing the current axis position, improving production efficiency.
● Medical Devices (MRI/Surgical Robots)
Medical systems such as MRI scanners and robotic surgical equipment require extremely reliable position sensing. In these environments, inductive absolute encoders are often preferred because they operate without magnets and are highly immune to external magnetic fields. This ensures stable performance in sensitive medical environments where magnetic interference must be minimized.
● Aerospace and Medical Systems
In aerospace control systems and safety-critical industrial equipment, position information must remain available even after an unexpected power loss. Absolute encoders provide continuous position retention, supporting reliable operation in applications such as aircraft actuators, antenna positioning systems, and precision guidance mechanisms.
Choosing the Right Absolute Encoder
Selecting the correct absolute encoder requires evaluating both motion performance and system integration requirements.
Step 1 — Define Motion Requirements
Start by identifying the motion characteristics of the application. The key parameters include rotational speed, torque, load inertia, and required resolution. High-performance servo systems often require higher bit depth to achieve smooth motion and precise positioning. Their application with rapid acceleration or dynamic movement may also require encoders with low signal latency and fast update rates.
Step 2 — Evaluate Environmental Conditions
The operating environment plays an important role in encoder reliability. Factors such as dust, oil contamination, temperature variation, vibration, and electromagnetic interference (EMI) must be considered. Harsh industrial environments may require encoder technologies that are less sensitive to contamination and electrical noise.
Step 3 — Select Encoder Technology
Different sensing technologies provide different advantages depending on the application:
Optical Encoders offer very high precision and are suitable for clean environments with minimal contamination.
Magnetic Encoders are widely used in industrial automation due to their resistance to dust, oil, and vibration.
Inductive Encoders provide strong immunity to electromagnetic interference and operate reliably in demanding environments.
Selecting the right sensing method ensures the encoder maintains stable performance throughout the system's operational life.
Step 4 — Match Interface & Output
The encoder interface must be compatible with the motion controller or servo drive. Industrial communication protocols such as SSI, BiSS-C, CANopen, and SPI determine data transfer speed, noise immunity, and synchronization with the control system. Proper interface selection ensures reliable data transmission and optimal control loop performance.
Step 5 — Consult Mosrac for System-Level Optimization
For high-performance motion systems, encoder selection should be optimized together with the motor and mechanical structure. Mosrac provides engineering consultation for custom encoder–motor matching, helping system designers integrate precise position feedback into advanced motion systems.

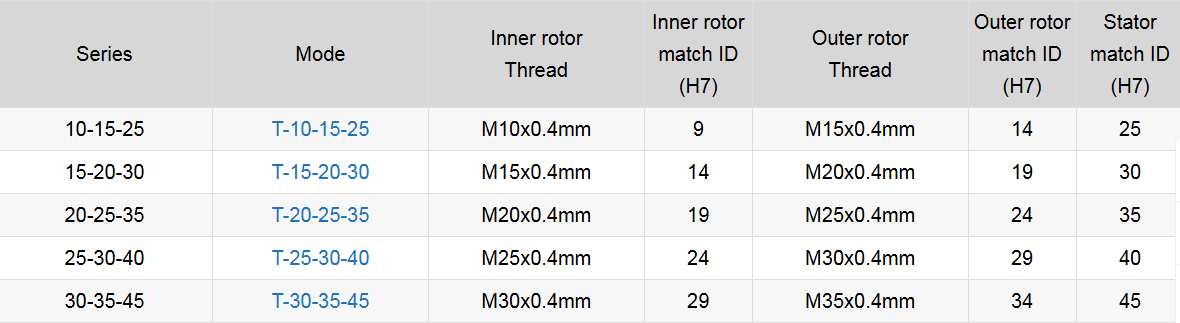
T-Series Magnetic Dual Encoder
Mosrac offers T-Series Absolute Magnetic Rotary Encoder (Model: T-20-25-35), designed specifically for robot joint motors and integrated servo systems. This encoder features a 20 mm hollow structure with dual encoder architecture, providing extremely high positioning precision of ±0.01°. It uses a 24-bit multi-turn absolute-encoding system and supports industrial communication interfaces such as BiSS-C and RS-485.
The T-Series encoder operates with a 5 V input supply and supports a wide operating temperature range from −40°C to 85°C, making it suitable for demanding industrial environments. The encoder architecture includes configurable rotor and stator dimensions, allowing integration with different robot motor designs.
For application-specific encoder selection, mechanical integration guidance, and optimized motor-encoder solutions, our engineering team at Mosrac can recommend the most suitable magnetic encoder configuration - or design a custom solution for your applications.
Conclusion
The absolute encoder provides precise position feedback, immediate startup position, and reliable performance in modern motion control systems. By eliminating homing routines and maintaining position after power loss, it improves safety, efficiency, and control accuracy in robotics, CNC machines, and industrial automation. Selecting the right encoder technology and interface is essential for achieving stable and high-performance motion control.
Mosrac specializes in precision absolute encoder engineering, supporting demanding applications with robust sensing technologies and system-level integration expertise. Explore the absolute encoder portfolio or request a custom-engineered solution to ensure reliable, long-term motion feedback for your next application.
Frequently Asked Questions (FAQs)
1. What is an absolute encoder?
The absolute encoder is a position sensor that outputs a unique digital value for every shaft or linear position. Unlike incremental encoders, it retains position data after power loss, allowing controllers to know the exact position immediately at startup.
2. How does an absolute encoder work?
The absolute encoder detects shaft position using optical, magnetic, or inductive sensing. The sensor reads encoded position patterns and converts them into a digital value, which is transmitted to the controller through interfaces like SSI, BiSS-C, or SPI.
3. What is the difference between single turn and multi turn absolute encoder?
A single-turn absolute encoder measures position within one rotation (0–360°). A multi-turn absolute encoder also tracks the total number of rotations, enabling accurate position monitoring across multiple revolutions in large motion systems.
4. Can absolute encoders work after a power loss?
Yes. Absolute encoders maintain position information even after power loss. When power returns, the controller instantly receives the correct position value without running a homing or reference routine.
5. What interface is best for industrial automation?
Interfaces such as BiSS-C, SSI, and CANopen are widely used in industrial automation. BiSS-C offers high speed and error detection, while SSI provides simple and reliable communication for many motion control applications.