









Introduction:
A latest record from Siemens estimated the global robotics, motor drives and controls market size at approximately 13 billion $US in 2022 with expectations to increase at a CAGR of 22.44%, reaching over 41 billion $US by 2028. As industries gradually shift toward automation, the integration of motors with robotics has become a technological innovation in enhancing performance and productivity, allowing executing more complicated tasks while reducing human interactions. Motors are the prime source of power for robot motion, allowing them to navigate the environment and deal with their environments. They transform electrical energy into mechanical energy, empowering robots to run wheels, shift limbs, and handle objects. The seamless integration between motors and robots can lead to significant advancements across industries, from manufacturing to healthcare.
MOSRAC motors design plays a vital role in precise motion control that is essential for robotics applications requiring accuracy and repeatability. They offer both framed and frameless motor options, providing flexibility in design and integration. These are used in collaborative robots and other robotics applications, highlighting their suitability for a wide range of robotic tasks. These motors offer various torque and power ratings, enabling them to select the motor for their specific robotic needs. They are compact and lightweight, making them easy to integrate into robots and reduce the overall weight of the robotic system.
In this article, we will discuss and provide an in-depth exploration of the design and development of robots, focusing on integration of motor control and challenges associated with designing efficient, precise, and safe robotic systems. This extensive analysis will assist you making an informed decision to select MOSRAC’s motor for robotics applications.
Motor Controls in Robotics:
Advanced control designs emphasize the efficiency of motors in robotic technologies through precision, performance, and energy optimization, such as:
1. Boston Dynamics:
Boston-based robotic technology operates state-of-the-art motors for robust movement models. This technique facilitates integrating robust hardware with complex software for predictive controlled performances. It plays as a pioneer to enhance the efficiency of motor controls in robot navigation.
2. Tesla Bot:
Tesla Bot uses an advanced motor control structure for effective navigation and movement. Tesla’s motor design incorporates high-torque with real-time feedback in control systems. The control technique based on Bot's technology can execute seamless navigation despite the challenging environment. It can reduce wear on the motor system and increase durability.
3. Harmonic Drive System:
Harmonic drive systems with embedded control algorithms provide efficient solutions for advanced motor controls in robotic navigation and movement. It uses concise and zero-backlash gears with high torque capability to have accurate and smooth motion for robots. Integration of embedding control algorithms within the motor system for real-time improves torque, speed, and energy consumption of a robot.
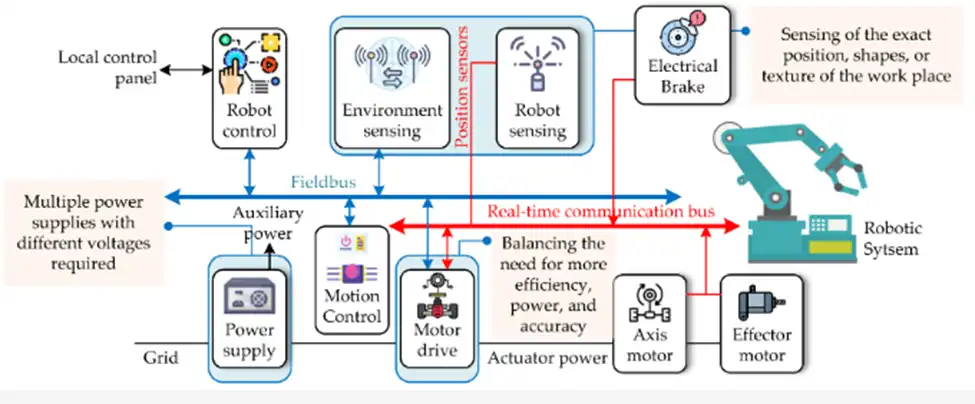
Schematic Representation of Robotic System
Importance of Motor Design in Robotics:
1. Precision and Accuracy:
Energy-efficient motor design can improve run time through battery-powered systems in robotics. Accuracy in motor designs enhances heat dissipation management to eliminate motor degradation with battery life extension and low operational costs. [1]. Thus, energy-efficient motors become acceptable and pragmatic robotic solutions for various industries.
2. Dynamic Responsiveness:
An efficient motor design can improve the robot's capacity to react quickly to varying conditions and environments. The modern advanced motor designs with low-latency feedback loops and high-speed control methods can upgrade precise modulation of torque and velocity. Accurate motor designs improve transitions between movements to empower robotics to implement sophisticated and real-time tasks [2].
3. Energy Efficiency:
An effective motor design integrated by robotic engineering minimizes power consumption and regulates heat dissipation. The energy efficiency upgrades battery life and minimizes operating costs for robotic technology [3].
Energy efficiency management relates to the application of useful power resources, executing control algorithms and power management systems to enhance the robot's operational time and efficiency. The following basics delivers the ideas for improving robot power systems and executing efficient energy management techniques.
1. Power Source: The power source is the main part of any robot power system, such as batteries, fuel cells and solar cells.
2. Power Distribution: This subsystem can route power from the source to other elements of the robot, such as voltage regulator, power converter and safety system.
3. Energy Storage: Robots usually integrate energy storage systems for peak power demands, such as supercapacitor.
4.Power Management System: This part observes power consumption and battery levels, executing energy-saving techniques, integrating power distribution to different subsystems, handling charging and discharging cycles.
5. Motors: Motors play a significant role in overall energy efficiency, such as brushed DC, brushless DC, and different kinds of AC motors.
Key Factors of Motors for Robotics:
1. Motor Design:
The motion system can move and control every robotic joint. During motor rotation, the motor requires capabilities like cogging, reduced micro ripples and jerks. A compressed motor is useful for high torque density in lightweight robots.
2. The Drive Train:
To improve motor performance, the drive train is a module of the robot with motor, gear head, encoder, allowing feedback on location and speed. To meet the required motion output values, such as torque, speed, acceleration and position, accurate dimension and size are critical. Design modifications can have an influence on the operation of the motion system. The drive train is a more efficient method to increase the motion performance and design integration.
3. Optimizing Design Efficiency:
Optimizing motor design for robotics involves focusing on efficiency, reducing weight, and improving torque density. This can be achieved through various strategies, including choosing appropriate motor types, optimizing trajectory planning, and using efficient gear systems.
Motor Design Criteria:
1. Integration with Control Systems:
The motor should be compatible with the robot control system. To ensure seamless integration and efficient control of robot movements, factors such as the motor’s communication protocol, feedback capabilities, and programming requirements should be considered.
2. Application Requirements:
It is essential to assess the requirements of robotics applications like torque, speed, precision, and power consumption. The load capacity and the required motor power need to be determined for robot movements.
3. Size and Weight:
The robot's movements depend on the motor's size and weight. It is critical to select a motor that fits the space.
4. Environmental Factors:
It is important to select a motor that can withstand the environmental conditions and maintain reliable performance.
5. Budget:
The motor that provides the best value for specific application without compromising on quality or reliability based on the cost-performance ratio needs to be considered.
Advantages:
1. Improved Precision and Accuracy:
Motors empower robots to execute sophisticated tasks with high accuracy. For example, in the assembly of electronics, motors allow for precise location during the assembly of complicated components. Motors play a vital role in surgical robots for their precise movements during operations.
2. Dynamic Motion Control:
The high-speed capabilities of motors play a vital role in the applications requiring quick movements. Motors can do quick and precise picking and placing of items on production lines in pick-and-place systems. Motor-driven robots can manage fast packaging roles with minimum error in high-speed packaging.
3. Greater Efficiency:
Motors can improve energy consumption by regulating torque and speed according to the load requirements. This efficiency generates less operational expenses and greater equipment lifespan.
Robots used in different industries
Challenges of Motor Design and Development in Robotics:
1. Power Efficiency Optimization:
To ensure longer battery life, applications for sensing, processing, and real-time control need to keep a balance between high performance and power efficiency. Using intricate design techniques with many components is unnecessary to achieve power efficiency.
2. Higher Precision and Accuracy:
Product miniaturization plays a vital role in choosing the right motor in many applications. For smaller products, accurate motion needs sophisticated motor control and position feedback.
3. Reducing Weight, Cabling and Cost:
Motor electronics are shifting from control cabinets to direct integration into robot joints, reducing weight, cabling and system expenses. Component manufacturers like to create solutions, empowering more feature integration in smaller integrated circuit packages. Space limitations need more power density and efficiency.
4. Increased Safety Requirements:
Conventional safety issues need the separation of humans and robotics, usually keeping robots in cages. Since automation demands closer cooperation and interaction, collaborative robots help boost productivity but require motors that can deliver safe stop, secure speed, torque and motion control.
5. Synchronization between Motor and Robot:
Synchronization between the motor and robot is critical for achieving smooth, coordinated movements. Some steps ensuring synchronization include calibrating feedback systems, adjusting motion control parameters, and testing synchronization.
Why Synchronization is Important?
▪︎ Precision and Accuracy: For straight-line movement or specific turns, synchronizing motors allow the movement at the same speed with the right direction, preventing unexpected deviations.
▪︎ Coordinated Movement: In robots with multiple motors, synchronizing motors allows for coordinated movements of different parts of the robot.
▪︎ Multi-Robot Coordination: When multiple robots need to work together, synchronization is crucial for cooperative movement or communication.
Techniques for Motor Synchronization:
▪︎ Master-Slave Architecture: One motor acts as the master with speed and direction, while the other motor as a slave following the master, usually at a predefined ratio.
▪︎ PID Control: Proportional-Integral-Derivative (PID) control algorithms regulate the motor's speed and direction to synchronize with a reference point.
▪︎ Single Drive for Multiple Motors: Some motor drives power multiple motors simultaneously, simplifying synchronization.
6. Optimization of Robot Movements:
Motor allows the optimization of the robot’s movements, improving precision and control. Some of the main parameters include proportional gain that regulates the drive’s response to error in position or speed, integral gain that helps remove steady-state errors by adapting for cumulative error, derivative gain that minimizes overshoot by adjusting the rate of error change. Accurate tuning of these parameters can significantly improve the performance of the robotic system.
Why MOSRAC Motors are the best for Robotics?
MOSRAC motors are well suited for robotics because of high efficiency, precise motion control, and the ability to integrate into collaborative robots. They can achieve quick speed and acceleration, making them well suited for robotics applications where precise positioning and repeatable movements are important. Because of the following reasons, MOSRAC motors are an excellent choice for robotics:
1. High Efficiency:
MOSRAC’s frameless brushless direct drive torque motors have high efficiency, with less energy consumption and longer battery life for mobile robots.
2. Precise Motion Control:
These motors are designed for precise and repeatable motion, which is crucial for tasks requiring accuracy and coordination, like picking up objects.
3. Integrated Design:
MOSRAC motors are specifically designed for collaborative robotics that can be easily integrated into robots that work alongside humans.
4. Various Series for Different Applications:
MOSRAC offers a range of motor series (U19, U25, U38, etc.) with varying torque, power, and speed ratings, allowing users to choose the most appropriate motor for their specific robotic application.
5. Custom Solutions:
It provides custom solutions for specific needs, enabling users to tailor the motor to their unique requirements.
6. Wide Range of Applications:
MOSRAC motors, like U-Series and F-Series, are used in various robotic applications, including collaborative robots, medical robots, and industrial robots, showcasing their versatility.
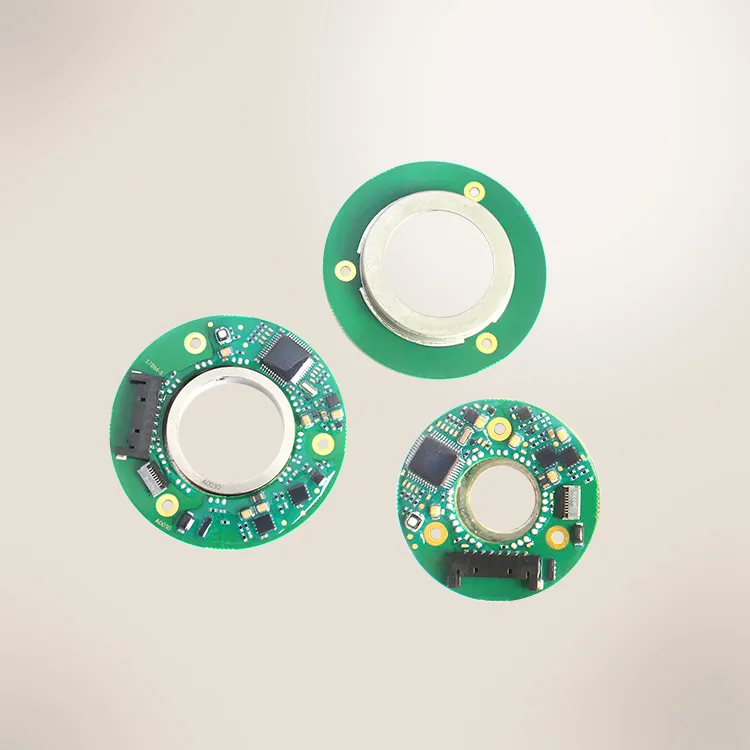
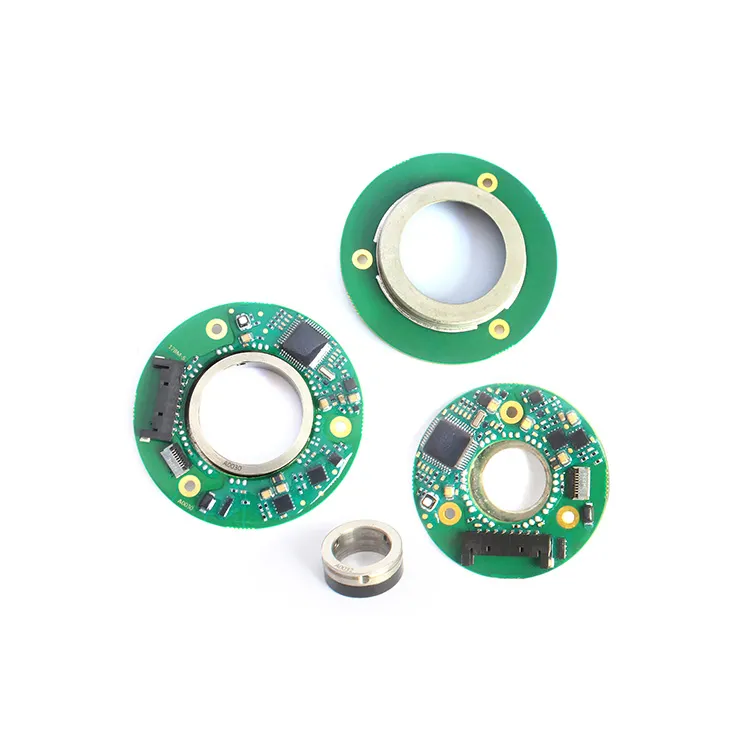
The key features of MOSRAC frameless motors are high torque, speed, size, and temperature. These torque motors provide the most adaptability and are lightweight. Since there are no extra transmission parts, frameless direct-drive torque motors are safe. MOSRAC U38, U50, and U60 series frameless motors are widely used in robots. These motors provide a very compact design, excellent precision, better overload capacity, high torque density, and lightweight. They possess industry-leading performance and are cost-effective.

MOSRAC Frameless Brushless DC Torque Motor
Conclusion
Integrating advanced control strategies as harmonic drive systems and dynamic feedback mechanisms, facilitates motor efficiency in robotic applications. It provides robotic flexibility in navigating complex environments while minimizing energy consumption and wear. The fusion of motor drives and controls has a great impact across various industries, such as manufacturing, automation, logistics and warehousing systems. Integrating a motor with robotics is a complicated method but improves the accuracy, adaptability, and efficiency of automated systems significantly. Choosing the right motor, ensuring proper tuning, and improving communication protocols are some of the essential considerations for seamless integration.
MOSRAC motors are excellent in robotics for their high torque density, precision control, and suitability for both collaborative and industrial robots. These motors are particularly well suited for applications requiring precise movement, high torque, and compact designs. They offer a high torque-to-size ratio, which is crucial in robotics where space is often limited and strong movement is needed.
Got a question about motor controls for robotics? Contact me by email.
References:
[1]. Gervillié-Mouravieff, Charlotte, et al. "Non-destructive characterization techniques for battery performance and life-cycle assessment." Nature Reviews Electrical Engineering 1.8 (2024): 547-558. http://dx.doi.org/10.1038/s44287-024-00069-y
[2]. Javaid, Mohd, et al. "Substantial capabilities of robotics in enhancing industry 4.0 implementation." Cognitive Robotics 1 (2021): 58-75. https://doi.org/10.1016/j.cogr.2021.06.001
[3]. Singh, Rupam, Varaha Satya Bharath Kurukuru, and Mohammed Ali Khan. "Advanced Power Converters and Learning in Diverse Robotic Innovation: A Review." Energies 16.20 (2023): 7156. http://dx.doi.org/10.3390/en16207156