










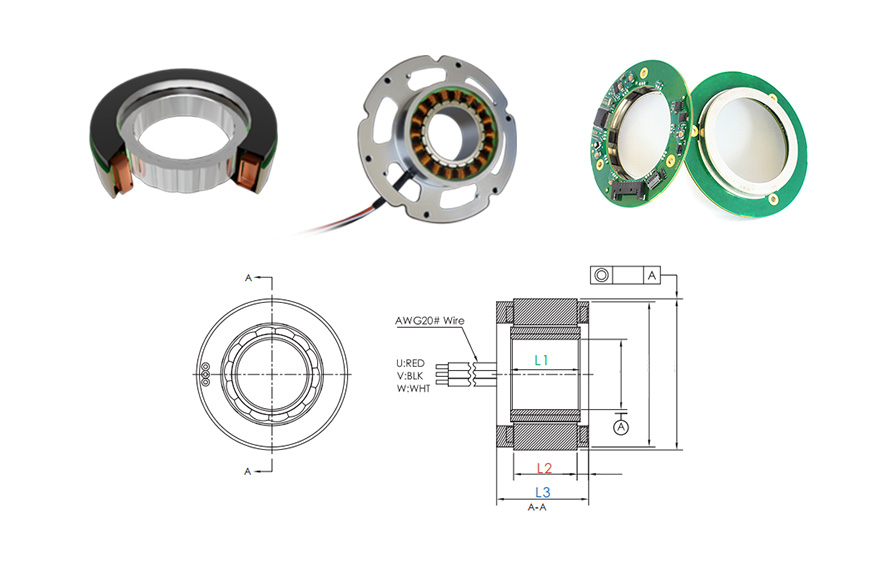
U160 Series Brushless Frameless Inrunner Motor
Introduction
In the world of precision engineering, motor constant is the hidden factor that determines how effectively a motor converts electrical energy into mechanical torque. These crucial parameters, like the torque constant and back-EMF constant, directly influence the performance characteristics of a motor, dictating its ability to deliver precise movements and efficient power conversion. It impacts everything—from efficiency and heat generation to size and reliability!
Selecting the right motor, defined by its specific motor constants, is therefore paramount for optimizing system functionality and achieving desired outcomes in various applications. Mosrac offers cutting-edge solutions, providing a comprehensive range of motors with clearly defined motor constants. This enables industries to make informed choices, ensuring they select the ideal motor to meet their unique requirements and maximize the efficiency of their automated systems!
What is a Motor Constant?
The motor constant (Km), also known as the motor size constant or torque-to-power ratio, is a crucial performance metric used to evaluate the efficiency of a motor in converting electrical energy into mechanical torque while managing heat generation. Expressed in Nm/√W (Newton-meters per square root watt), Km helps engineers determine how much torque a motor can deliver for each unit of power dissipated as heat in the windings.
Rotor and Stator of an Electric Motor
Mathematically, the motor constant (Km) is defined as the ratio of the motor torque (τ) to the square root of the power loss (Ploss) in the winding:
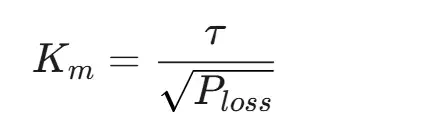
Where:
▪︎ τ is the motor torque (typically in Nm)
▪︎ Ploss is the power dissipated as heat in the motor windings (typically in Watts)
Under certain assumptions, and if the torque constant (Kt) and terminal resistance (R) are known, the motor constant can also be expressed as:
Where:
▪︎ Kt is the torque constant (typically in Nm/A), representing the torque produced per unit of current.
▪︎ R is the terminal resistance of the motor windings (typically in Ohms).
This relationship highlights Km as a direct indicator of how efficiently a motor can produce torque without overheating. A higher Km means the motor can provide more continuous torque for the same amount of thermal loss—ideal for continuous or duty-heavy applications like robotics, automation, and CNC systems.
Effective Motor Constant
The concept of the motor constant (Km) is applicable across different types of electric motors, but its significance and the factors influencing it can vary. Mosrac offers a range of DC, brushless DC, and frameless torque motors, and understanding Km in each context is vital for optimal selection.
Let’s understand the differences in applications across:
1. DC Motors
In brushed DC motors, Km tends to vary over time due to brush wear and mechanical friction. These motors are generally chosen for cost-sensitive or low-duty applications. However, their lower Km values make them less suitable for thermal-critical or precision-driven environments.
2. Brushless DC Motors (BLDC)
BLDC motors offer superior Km values due to their frictionless operation and high copper fill factors. With no brushes to cause wear or voltage drops, their performance remains stable over time. BLDC motors are specifically engineered for precision control, high torque per amp, and consistent thermal performance.
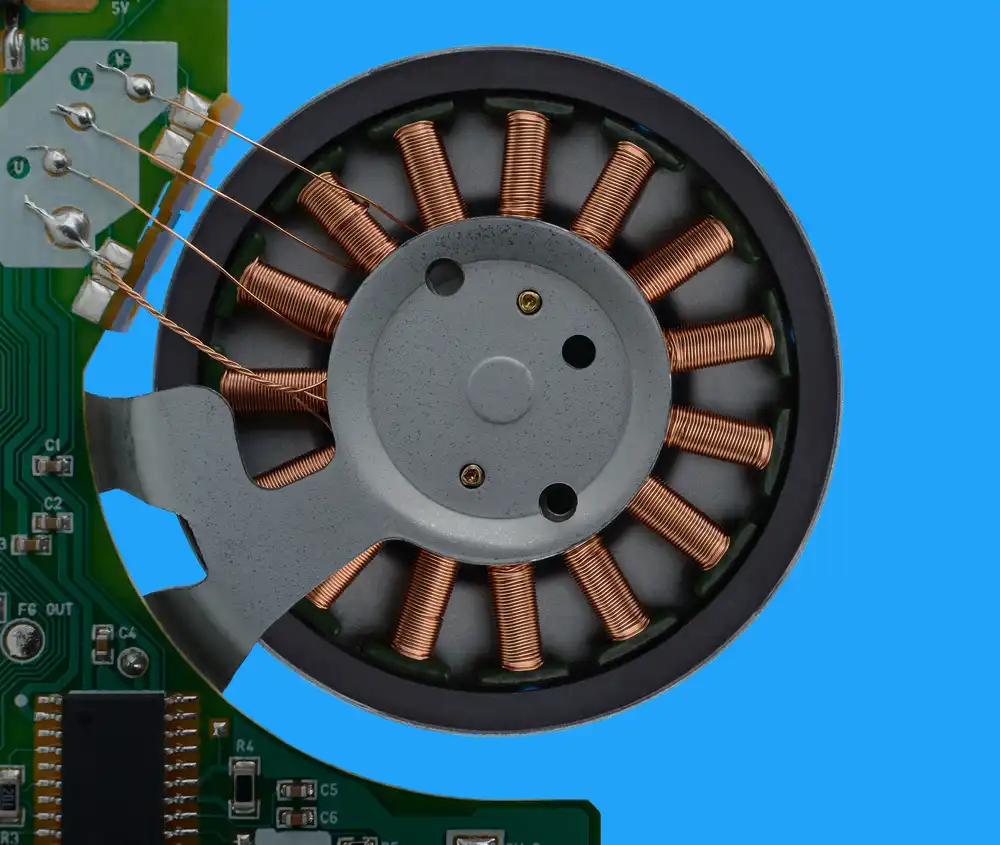
The Brushless Motor Coils on Plate
For example, U160 Series BLDC frameless motors manufactured by Mosrac are known for maintaining high Km ratings while fitting within compact enclosures—ideal for dynamic robotic joints.
3. Frameless Torque Motors
Frameless torque motors offer the highest Km ratings among motor classes. They allow for custom winding configurations, optimized slot/pole ratios, and flexible thermal integration. These motors are integrated directly into mechanical assemblies (e.g., robotic joints), where thermal constraints are tight and space is limited. By enabling direct-drive motion, they eliminate gear backlash and maximize energy conversion—making Km an essential design parameter.
Recommended Reading: Understanding Motor Windings: Key Differences, Benefits, and Innovations
Understanding the Types of Motor Constants
To fully assess motor performance, engineers rely on a range of motor constants. Each of these constants reflects a different physical characteristic or dynamic behavior of the motor. Knowing how they interrelate allows for precise system optimization, particularly when selecting or customizing motors for demanding applications like robotics, CNC machines, or surgical automation.
1. Torque Constant (Kt)
The torque constant (Kt) represents the amount of torque a motor produces per unit of current flowing through its windings.
Units: Newton-meters per Ampere (Nm/A) or ounce-inches per Ampere (oz-in/A).
Formula:

Where:
▪︎ T is the Torque (Nm)
▪︎ I is the Armature current (A)
Higher Kt means more torque for less current, and reducing heat! The frameless BLDC motors offer optimized Kt values for torque-dense applications like robotic joints and exoskeletons.
2. Voltage Constant (Ke) or Back-EMF Constant
The voltage constant (Ke), also known as the back-electromotive force (back-EMF) constant, relates the motor's rotational speed to the voltage it generates when acting as a generator.
Units: Volts per radian per second (V/(rad/s)) or Volts per revolution per minute (V/RPM).
Formula:
where:
▪︎ Vback-EMF is the back electromotive force (V)
▪︎ ω is the Angular velocity (rad/s)
BLDC motors with high Ke values help reduce noise and ensure stable velocity in automated processes. The motors manufactured by Mosrac are built with optimized Ke for better speed regulation in servo systems.
3. Electrical Time Constant (Te)
The electrical time constant (Te) represents the time it takes for the current in the motor windings to reach approximately 63.2% of its final value when a step voltage is applied. It is determined by the inductance and resistance of the motor windings.
Units: Seconds (s).
Formula:
where:
▪︎ L is the inductance of the motor windings (Henrys)
▪︎ R is the resistance of the motor windings (Ohms)
Shorter Te improves control responsiveness—crucial in pick-and-place robotic arms. The torque motors maintain low Te to ensure rapid current response under load fluctuations.
4. Mechanical Time Constant (Tm)
The mechanical time constant (Tm) represents the time it takes for the speed of the motor to reach approximately 63.2% of its final value when a constant torque is applied (assuming no load). It is determined by the inertia of the motor and the viscous friction.
Units: Seconds (s).
Formula:

where:
▪︎ J is the moment of inertia of the rotor (and any directly coupled load) (kg·m²)
▪︎ B is the viscous friction coefficient (Nm/(rad/s))
Determines system acceleration/deceleration capability. A lower Tm is desirable for fast robotic actuation. The frameless motors are optimized for low Tm by minimizing rotor inertia while maintaining torque output.
5. Thermal Resistance (Rth)
Thermal resistance (Rth) quantifies the motor's ability to dissipate heat to its surroundings. It represents the temperature rise per unit of power dissipated as heat.
Units: Degrees Celsius per Watt (°C/W) or Kelvin per Watt (K/W).
Formula:

where:
▪︎ ΔT is the temperature difference between the motor windings and the ambient environment (or heat sink).
▪︎ Ploss is the power dissipated as heat in the motor windings.
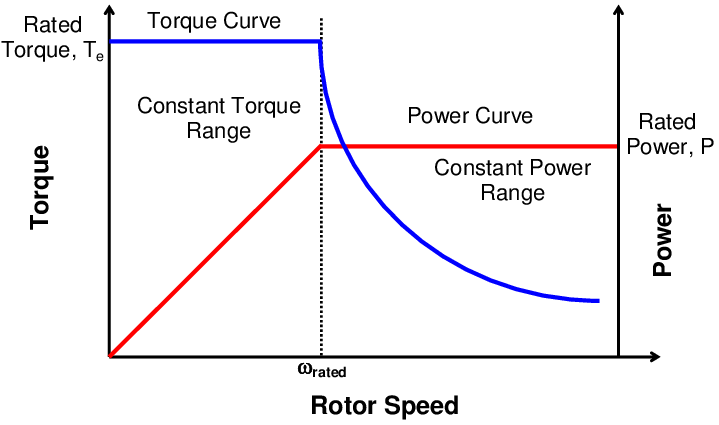
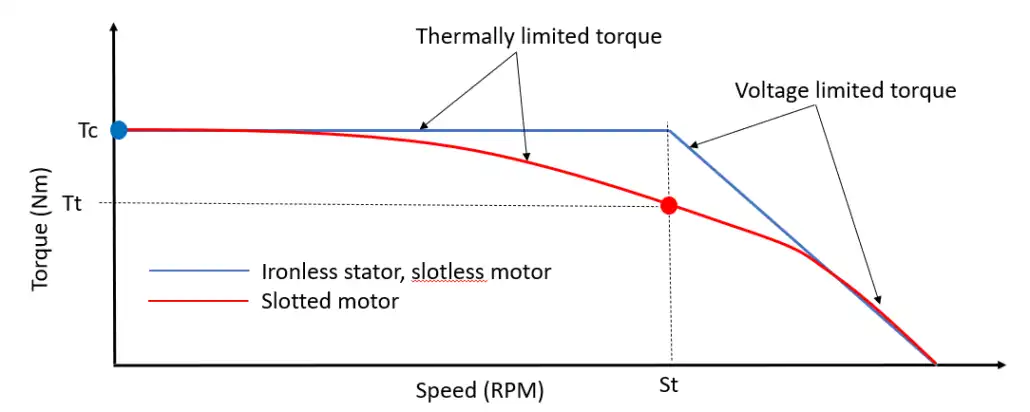
Torque-Speed characteristics during constant Torque and constant Power regions
Lower Rth means the motor can dissipate heat more effectively — important for compact designs. The housing and core materials built by Mosrac are engineered to keep Rth low, even under continuous operation.
Recommended Reading: Motor Sizing Guide: How to Select the Right Motor for Optimal Performance
Why Motor Constant Matters in Motor Selection & System Design
The motor constant (Km) is a pivotal parameter that significantly influences motor selection and overall system design, particularly when considering continuous operation, thermal efficiency, and space constraints. While the torque constant (Kt) provides a direct link between current and torque, the motor constant offers a more holistic view of a motor's efficiency in producing torque without excessive heat generation, making it exceptionally practical for many real-world applications.
1. Why Km is more practical than Kt for Continuous Operation?
For continuous operation, the primary limiting factor for a motor is often its ability to dissipate heat. Excessive heat buildup can lead to winding insulation failure, demagnetization of permanent magnets, and ultimately, motor failure. While Kt tells you how much torque you get per amp, it doesn't directly tell you how efficiently that torque is generated in terms of heat.
The motor constant (Km) directly incorporates the power loss associated with producing a given torque. A higher Km value signifies that the motor can produce more torque for the same amount of power dissipation. Therefore, for continuous operation where minimizing heat is crucial, a motor with a higher Km will generally:
▪︎ Run Cooler: For the same continuous torque requirement, a motor with a higher Kmwill draw less current, leading to lower I2R losses and a lower steady-state temperature.
▪︎ Handle Higher Continuous Loads: The superior thermal efficiency allows the motor to sustain higher continuous torque output without exceeding its thermal limits.
▪︎ Offer Better Energy Efficiency: Less electrical energy is converted into heat, leading to more efficient operation over extended periods.
2. Understanding Km as a measure of Thermal Efficiency
Km can be directly interpreted as a measure of the thermal efficiency of a motor in producing torque. A higher Km implies a better "torque-to-heat" conversion ratio. Imagine two motors producing the same continuous torque. The motor with the higher Km will inherently have lower resistive losses. This means less electrical power is wasted as heat, and more is effectively converted into mechanical work (torque).
Therefore, when comparing motors for applications requiring a sustained operation, engineers often prioritize the motor with the highest possible Km that meets their torque and speed requirements, as this directly translates to better thermal management and longer operational lifespan.
3. How engineers use Km to select the best motor for space-constrained Applications?
In space-constrained applications, such as robotics, portable devices, and integrated machinery, selecting a compact yet powerful motor is critical. Km becomes a valuable tool in this scenario.
Engineers can use Km to:
▪︎ A: Maximize Torque Density within Thermal Limits: For a given physical motor size (and thus space constraint), a motor with a higher Km can often deliver the required continuous torque with lower current and thus less heat generation. This allows engineers to potentially select a smaller motor that can still meet the performance demands without overheating in the limited space.
▪︎ B: Optimize Heat Dissipation Strategies: In confined spaces, heat dissipation is challenging. A motor with a higher Km generates less heat for the same continuous torque, easing the burden on the thermal management system (e.g., heat sinks, cooling fans) that can be difficult to implement in space-constrained designs.
▪︎ C: Compare Motors Based on "Performance per Watt of Heat": By considering Km, engineers can directly compare different sized motors based on their ability to produce torque efficiently in terms of heat. This allows for a more informed trade-off between motor size, power output, and thermal management requirements within the spatial constraints.
▪︎ D: Achieve Target Performance with Smaller Motors: If two motors can provide the necessary torque, the one with a higher Km will likely run cooler and potentially be smaller for the same continuous output capability. This is because it requires less current (and thus can have smaller windings and potentially magnets) to achieve the desired torque level without overheating.
In summary, Km matters because it links torque, efficiency, and heat into one measurable constant—giving engineers a smarter way to design compact, high-performance systems.
Recommended Reading: Motor Cogging: Causes, Effects, and Proven Solutions for Smoother Performance
Motor Constant in Brushless and Torque Motors
When designing systems that require high efficiency, precision, and compactness, motor constant (Km) becomes a defining parameter—especially in brushless DC (BLDC) and frameless torque motors.

These motor types dominate modern robotics, automation, and medical devices due to their superior energy efficiency and thermal performance.
A: BLDC Motors
BLDC motors use electronic commutation, eliminating brushes and mechanical wear. They maintain stable Kt and Km values over their operational lifetime. BLDCs are commonly used in:
▪︎ Industrial automation
▪︎ Drones and UAVs
▪︎ Surgical equipment
Km Benefit: A well-optimized BLDC motor ensures continuous torque with reduced copper loss, making it suitable for medium-duty operations in high-precision environments.
Recommended Reading: What is a BLDC Motor? A Comprehensive Guide to Brushless DC Motors
B: Frameless Torque Motors
Frameless motors, such as the U160 Series by Mosrac, are designed for direct integration into mechanical assemblies. Without housing or shaft, these motors allow design engineers to tightly integrate them into joints or gimbals.
The key applications include:
▪︎ 6-axis collaborative robots
▪︎ Medical exoskeletons
▪︎ Semiconductor automation tools
Km Benefit: These motors deliver maximum continuous torque within a minimal thermal footprint, especially crucial in space-limited designs with no room for forced cooling.
Recommended Reading: The Frameless Motor: What it is, How it works, & Where to use it
C: Comparing Constants Across Motor Types
| Motor Type | Kt (Nm/A) | Km (Nm/√W) | Best Use Case |
| Brushed DC | Low | Low | Low-cost, low-duty applications |
| BLDC (Housed) | Moderate | High | Mid-range industrial & motion control |
| Frameless BLDC | High | Very High | High-end robotics, tight spaces, thermal limits |
| Stepper | Very High | Low | Positioning, not continuous torque |
The frameless motors, manufactured by Mosrac are optimized with custom winding and advanced thermal design, achieving a high Km while minimizing motor size—perfect for embedded and high-duty systems.
Motor Constant vs Motor KV
Two of the most common specifications you'll find on motor datasheets are Motor Constant (Kt or Km) and Motor KV (RPM/V). Though both are tied to how a motor behaves in response to electrical input, they serve very different purposes and are typically used in very different industries.
Let’s break it down:
Motor KV (often written as KV) is the number of rotations per minute (RPM) the motor produces per volt applied:
Motor constant Kt, on the other hand, defines how much torque the motor generates per ampere of current:
When using consistent SI units, these two are inversely proportional:

These equations only work if KV is in RPM/V and Kt is in Nm/A!
How Km Relates to Other Key Parameters
In industries like robotics, medical devices, and automation equipment, motor selection isn’t just about torque or speed—it’s about choosing a solution that balances performance, size, and thermal efficiency. This is where the Motor Constant (Km) plays a game-changing role.
Robotic Arm 6 Axis Industrial Robot
In collaborative robots, humanoid robots, and servo joint modules, motors are often expected to deliver continuous torque in compact, enclosed spaces. These applications cannot afford bulky cooling systems or large motors due to tight mechanical constraints.
But, why it matters?
▪︎ A higher Km means more torque per watt of heat loss, which is critical for continuous-duty operation.
▪︎ Enables engineers to use smaller motors without risking overheating.
▪︎ Helps achieve compact, efficient, and longer-lasting designs for systems like pick-and-place robotic arms, wearable exoskeletons, and autonomous service robots.
Practical Example: Selecting a Frameless Torque Motor for a Robot Joint
Application: 4th axis joint of a 6-axis Collaborative Robot
Requirements:
▪︎ Continuous Torque: ≥ 3 Nm
▪︎ Current Limit: ≤ 4 A (driver constraint)
▪︎ Outer Diameter: ≤ 80 mm
▪︎ Operation: Continuous, lightweight, no active cooling
Step 1: Estimate Required Motor Constant (Km)
Using the formula:

This tells us that any motor selected should have Km ≥ 0.95 Nm/√W.
Step 2: Compare Motor Options
| Motor Model | Outer Diameter | Km (Nm/√W) | Continuous Current (A) | Continuous Torque (Nm) | Suitability |
| Motor A | 60 mm | 0.72 | 4.2 | 2.5 | Low torque, insufficient Km |
| Motor B | 75 mm | 1.10 | 3.8 | 3.3 | Ideal match: fits space, torque, and thermal limits |
| Motor C | 85 mm | 1.35 | 4.5 | 4.0 | Exceeds size constraint |
Recommended Choice: Motor B
Balances thermal efficiency, and torque output, and fits within physical and electrical limits!
This is just one example—the same selection model can be applied to any high-performance motion system, including robotic wrists, surgical actuators, or automation tools.
Recommended Reading: How To Select a Frameless Torque Motor For a Robot Joint?
Conclusion
The motor constant (Km) is more than a number—it's a key to unlocking higher performance, better thermal management, and smarter motor selection. Whether you're designing compact robotic joints, medical equipment, or automation systems, a high Km helps reduce heat, save space, and increase efficiency. By understanding Km, engineers can make data-driven choices that align with real-world application needs.
If you can provide specific design requirements like target torque, current limits, voltage levels, and outer diameter or mounting space, Mosrac can help you perform a custom motor constant analysis and recommend the ideal frameless motor!
Frequently Asked Questions
Q. Is the motor constant fixed for all motors?
A. No, the motor constant (Km) varies by motor design, winding, and construction. Frameless torque motors are optimized to achieve higher Km values for improved thermal efficiency and torque performance.
Q. Can I increase my motor’s Kt?
A. Yes, by redesigning the windings or using stronger magnets, the torque constant (Kt) can be improved. However, it's often more effective to choose a custom motor solution with an already optimized Kt.
Q. How is Kt related to efficiency?
A. A higher Kt (Nm/A) results in more torque per amp, reducing current draw and minimizing I²R losses, which improves the overall motor efficiency—especially important in continuous-duty applications.
Q. What is the difference between Ke and Kt?
A. Ke relates voltage to speed (V/rad/s), while Kt relates torque to current (Nm/A). In SI units, they are numerically equal but serve different roles in motor control and feedback systems.
Q. How to measure a motor constant?
A. Measure torque and current for Kt, or back-EMF and speed for Ke. Use instruments like torque sensors, oscilloscopes, and encoders for accurate motor constant testing under no-load and loaded conditions.
Looking for a Custom Solution?
Reach Out Today for a personalized selection or a custom motor design tailored to your thermal and mechanical constraints!