












Specification
| General | Mechanical | ||
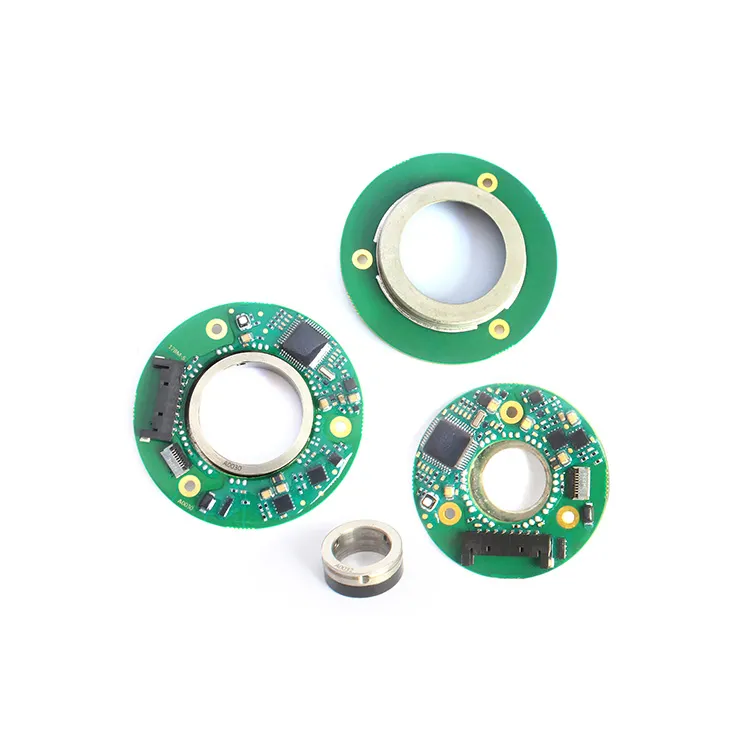
| resolution(bit) | 15-17 | outer\inner\height(mm) | 20\4\6.5 |
| maximum static error | ±0.05° | allowable mounting eccentricity(mm) | ±0.1 |
| repetitive error(lsb) | ±2 | allowable axial mounting tolerance(mm) | 0.6±0.1 |
| maximum operational speed(rpm) | 4000 | rotor inertia(kg·mm2) | 0.01 |
| measurement range | single turn | weight(g) | 4 |
| rotation direction | adjustable cw/ccw | material(stator/rotor) | FR-4 |
| Electrical | Environmental | ||
| supply voltage | 5v | emc | iec 61000-6-2/iec 61000-6-4 |
| current consumption | <80ma | operating temperature | -40℃-+125℃ |
| serial output | 6-pin connector/6-core cable | storage temperature | -50℃-+100℃ |
| communication | ssi/biss-c/rs-422(uart) | relative humidity | 0-99% |
| shock endurance/functional | 100g/11ms | ||
| vibration functional | 20g(10-2000hz) | ||
| protection | ip 40 | ||
| protection | ip 40 | ||
Drawing



Case studies (Customized frameless motors developed with our clients)




Additional Info
Download

C04206 Torque Motor Outline Drawing.pdf
OD: 20mm|Height: 6.5mm
c-series-c0420-inductive-encoders Catalog.pdf
OD: 20mm|Height: 6.5mm optional

OD: 20mm|Height: 6.5mm
-

-

-

-

Frequently bought together - Magnetic encoders
Direct drives need high-quality position signals to ensure optimal performance. Perfect measuring signals can enhance the surface quality of machined workpieces, reduce the machine frame's vibrations, minimize velocity-dependent motor noise, and prevent excessive heat generation in the motor.
Mosrac recommends using a magnetic encoder to enhance the accuracy, speed stability, and thermal behavior of direct drive axes. Because there is no mechanical transmission between the encoder and the feed unit, the position signals are not susceptible to inaccuracies or delays.
Custom combinations are available on request and contact us.



Previous